Кружок робототехники РОБОТИК
|
|
занятий: |
|
|
Программирование в среде IDE Arduino на языке С#/C+ дает дополнительные знания по программированию вне школьной программы. Эти знания могут помочь ученикам при решении различных задач на экзаменах ОГЭ и ЕГЭ. |
четверг с 14-00 ч. до 17-00 ч. |
|
 |
||
 |
|
|
 |
Сборка первых роботов с использованием набора Lego Wedo. |
|
 |
Теперь у нас есть конструкторы Lego. |
|
 |
|
|
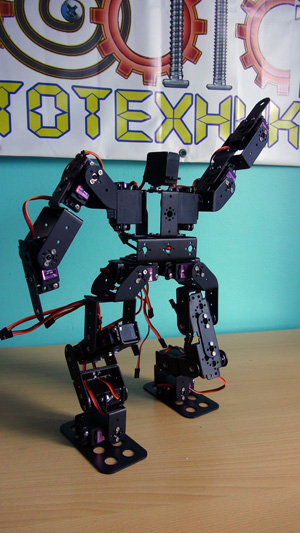 |
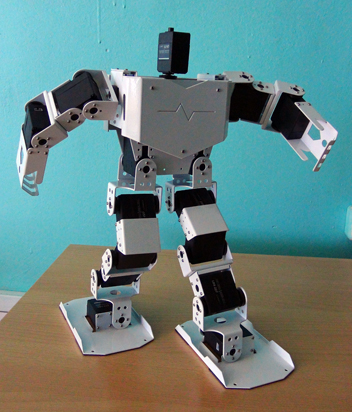
Робот-гуманоид
|
|
 |
|
успешно собран комплект робота-ящерицы |
 |
Успешно собран комплект робота-автомобиля
|
|
 |
 |
|
 |
|
|
|
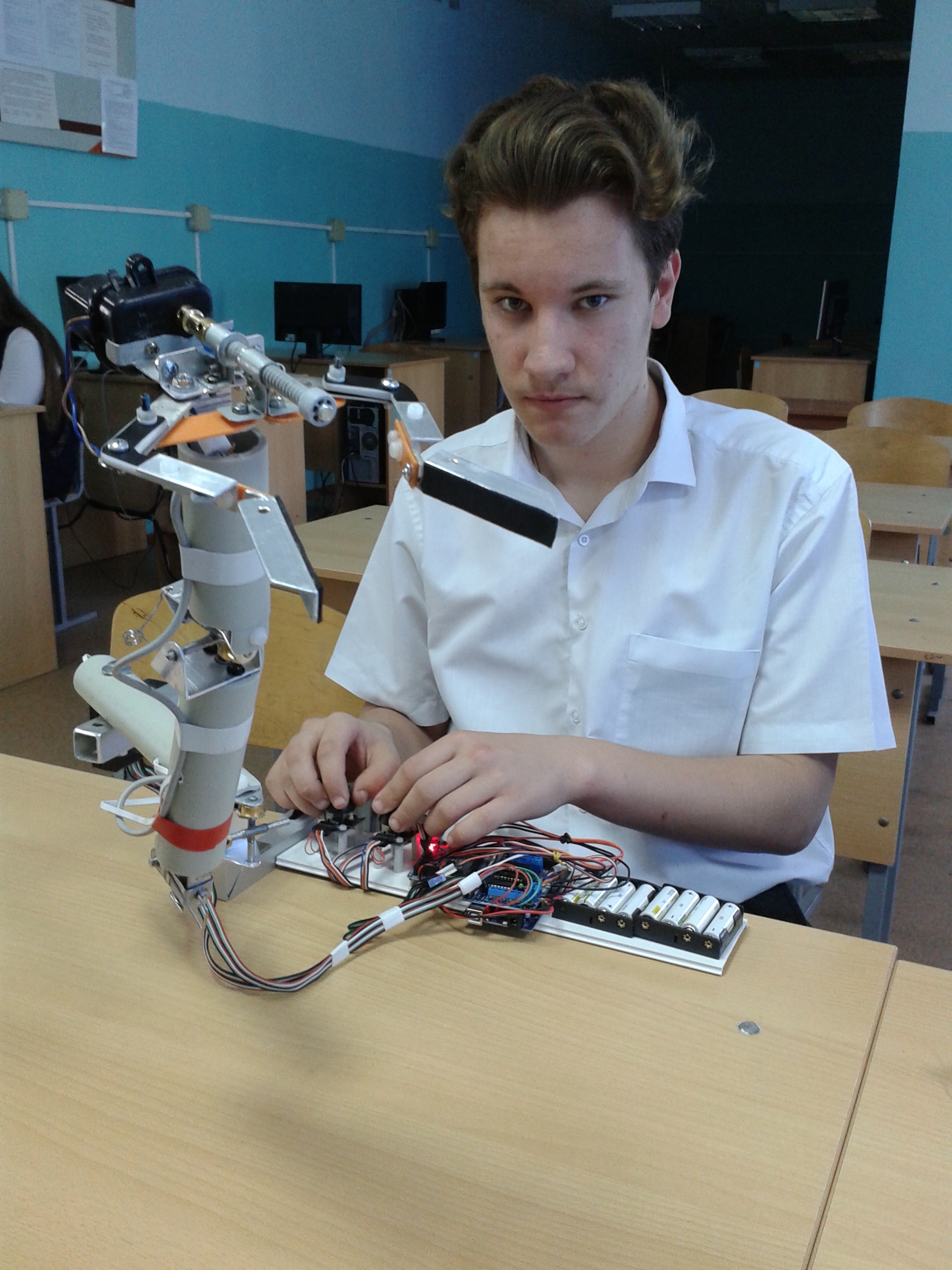
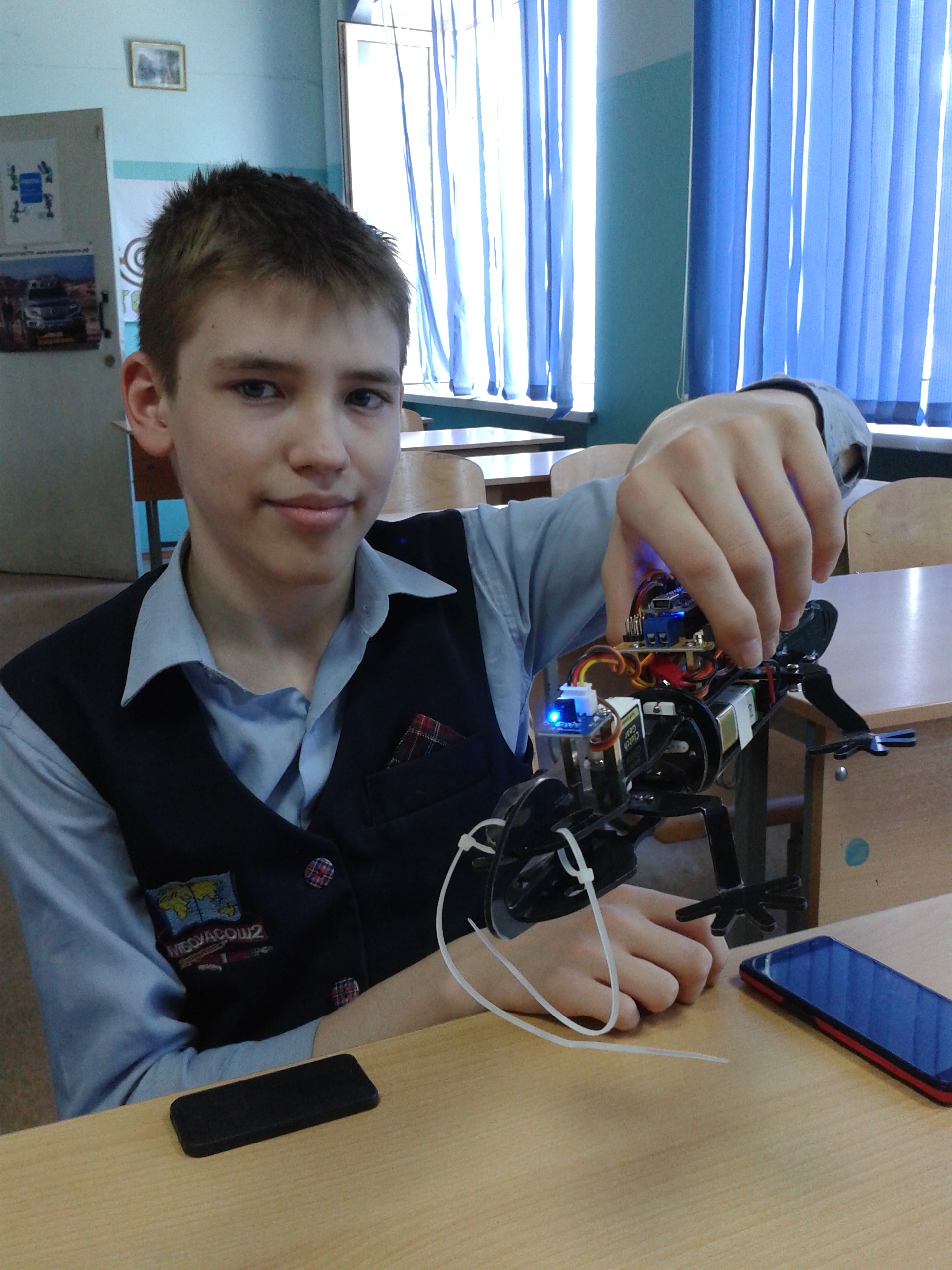
Манипулятор. |
||
|
манипулятор собран и готов к работе, |
|
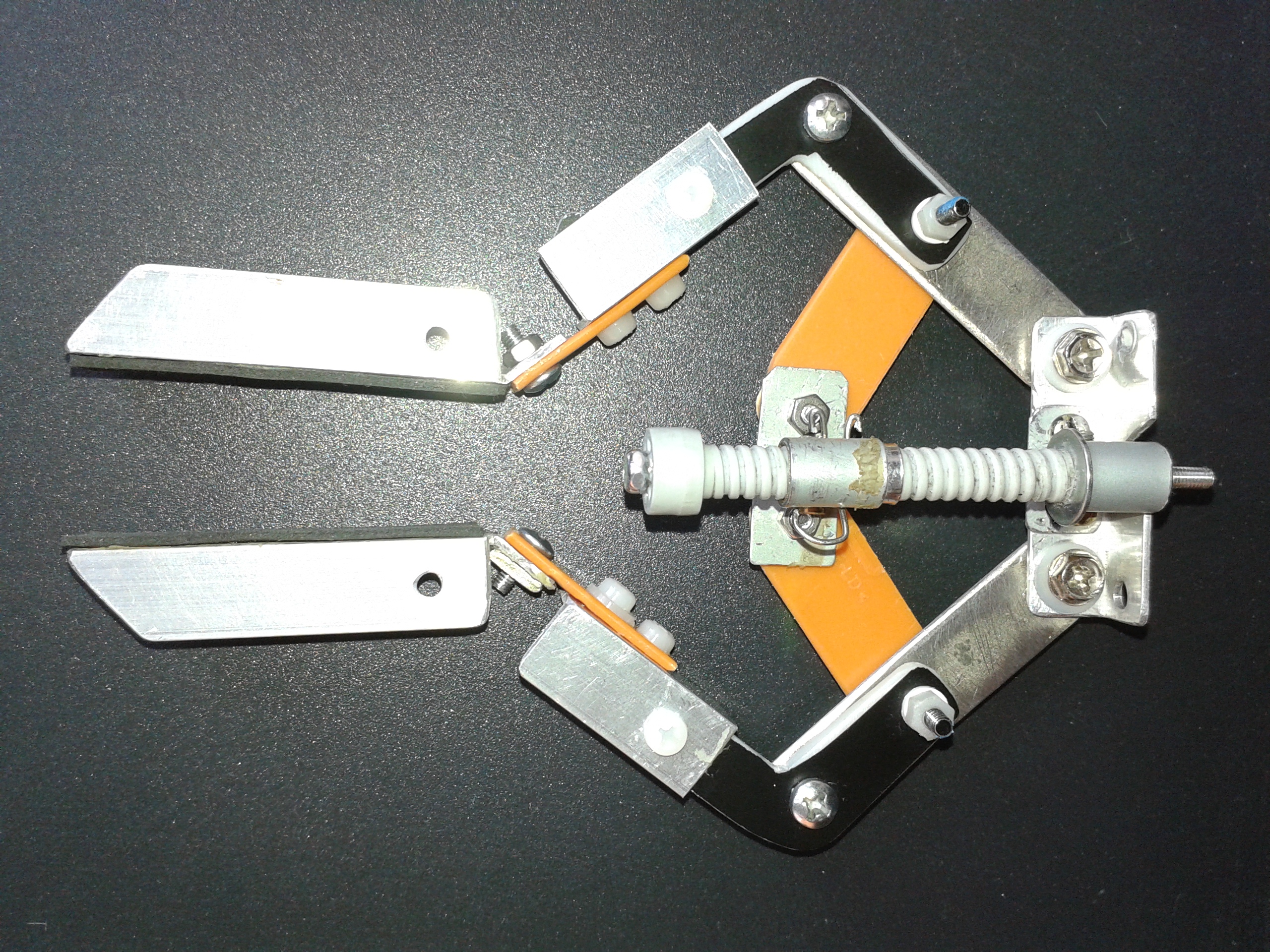 |
захват манипулятора, промежуточный вариант выполнен с учетом Первого закона робототехники - гибкие элементы не позволяют травмировать захваченый объект |
|
 |
Подготовка деталей Двигатели DC с редукторами |
|
 |
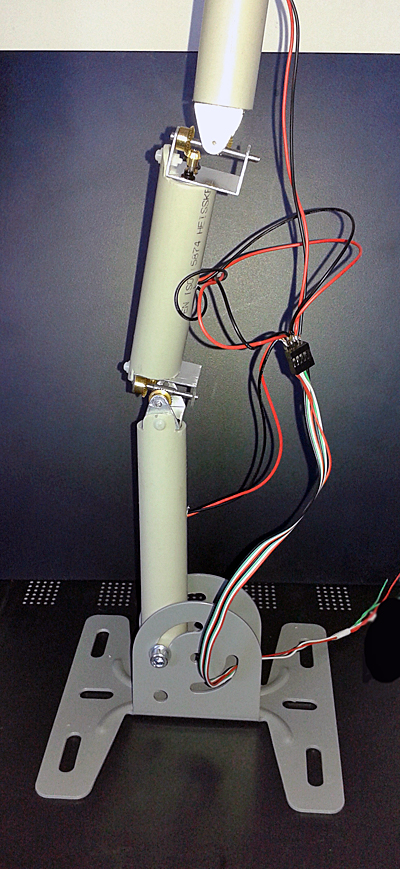
Действующий макет узла с 2 степенями свободы для манипулятора. Предполагается использовать два таких узла.
|
|
 |
действующие узлы в основном готовы |
|
 |
первая сборка деталей |
|
|
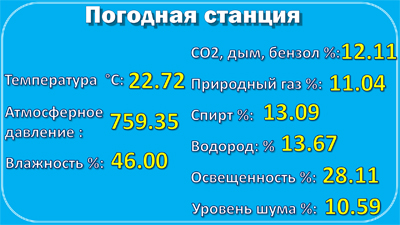
Погодная станция. |
||
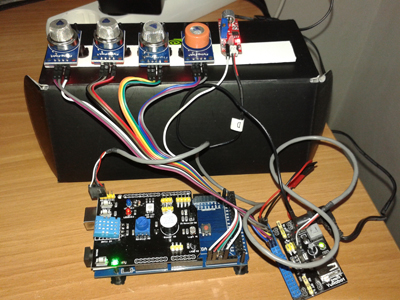 |
Пого Погодная станция.дная станция. Погодная станция. Компановка датчиков и плат Используются датчики: MQ3, MQ5, MQ8, MQ135, DHT11, LIGHT Первый рабочий вариант Написана и загружена в Ардуино программа управления Создана презентация с макросом для отображения показаний всех датчиков |
|
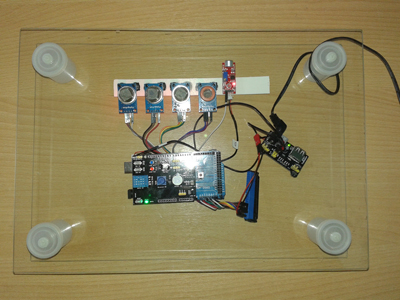 |
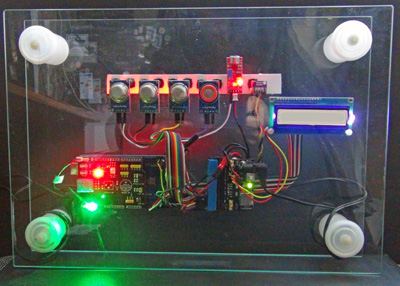
сделан корпус из ударопрочного стекла для наглядности работы разборный корпус позволяет получить доступ ко всем деталям проекта при работе погодной станции все датчики и платы включают индикацию, что особенно хорошо видно при малом освещении |
|
 |
Установлены и подключены все датчики: |
|
 |
|
|
|
Робот полива цветов. |
||
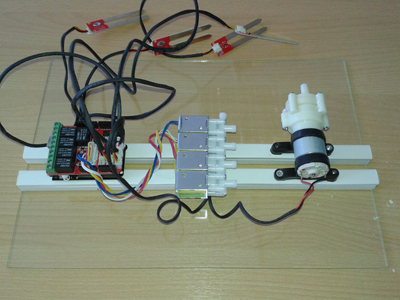 |
Сборка деталей Выбор дизайна корпуса Создание корпуса
|
|
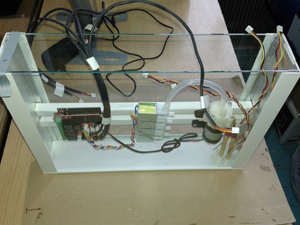 |
Компановка деталей в корпусе Загрузка программы управления
|
|
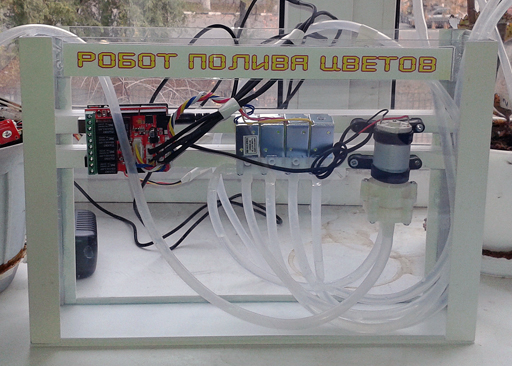 |
завершена работа по созданию корпуса и компановке деталей внутри корпуса решена проблема с протечкой клапанов подачи воды
|
|
 |
самые активные участники кружка установили робот полива цветов 12.11.2018г. в кабинете 311 |
|
 |
в эксперименте участвуют 4 цветка |
|



 «Канал «Вестник киберполиции России»
«Канал «Вестник киберполиции России»
QR-код официальной страницы школы вКонтакте

QR-код для для быстрого перехода к электронной форме сообщения ПОС




Если ты оказался в тяжёлой жизненной ситуации…
![]()
Органы управления образованием
Актуальные документы
 Все о ЕГЭ и ГИА
Все о ЕГЭ и ГИА

Цифровая образовательная среда



федеральный портал
"Российское образование"
Наши фотографии
